Resume Bab 6 "Kerangka Kerja Untuk Desain Filter Digital"
Kerangka Kerja Untuk Desain Filter Digital.
Tujuan dari bab ini adalah untuk memberikan kerangka
umum untuk desain filter digital. Panduan langkah demi langkah sederhana untuk
merancang digital filter dari spesifikasi ke implementasi dijelaskan. Pilihan
terbuka untuk desainer disetiap tahap proses desain dan faktor-faktor yang
mempengaruhi pilihan mereka yang disorot menggunakan beberapa contoh
ilustratif. Kebanyakan buku teks DSP memberikan ruang besar untuk teori filter digital, khususnya
metode pendekatan, mencerminkan upaya penelitian yang cukup besar dalam mencari
metode yang berguna menghitung koefisien filter dan kemajuan yang signifikan
yang telah dibuat dalam desain filter.
6.1 Pengantar filter digital
Sebuah filter pada dasarnya
adalah sistem atau jaringan yang selektif mengubah bentuk gelombang,
karakteristik amplitudo-frekuensi dan/atau fasa-frekuensi dari suatu
sinyal dengan suatu cara yang diinginkan. Tujuan dari filtering secara umum adalah
untuk meningkatkan kualitas sinyal (sebagai contoh, untuk menghilangkan atau
mengurangi noise), untuk mengekstrak informasi dari sinyal atau untuk
memisahkan dua atau lebih sinyal yang sebelumnya digabungkan untuk dibuat.
Sebagai contoh, penggunaan yang efisien dari saluran komunikasi yang tersedia.
Sebuah filter digital, seperti yang akan kita lihat
nanti adalah algoritma matematika yang diimplementasikan di perangkat keras
dan/atau perangkat lunak yang beroperasi pada sebuah sinyal input digital untuk
menghasilkan sinyal output digital untuk mencapai tujuan dari proses
pem-filteran. Istilah digital filter mengacu pada perangkat keras khusus atau perangkat
lunak yang rutin untuk melakukan penyaringan algoritma. Filter digital sering
beroperasi pada sinyal analog yang di-digital-kan atau hanya angka, mewakili
beberapa variabel, disimpan dalam memori komputer.
Sebuah blok diagram sederhana dari filter digital real-time,
dengan sinyal input dan output berupa analog, diberikan pada gambar 1. Sinyal
analog yang bandlimited adalah sampel secara berkala dan diubah menjadi
serangkaian sampel digital; x(n), n = 0, 1, . . . . . . Prosesor digital mengimplementasikan
operasi penyaringan, memetakan urutan input, x (n) , ke dalam urutan output, y (n).
sesuai dengan algoritma komputasi untuk filter. DAC mengubah keluaran yang
difilter secara digital menjadi nilai analog yang mana
kemudian sinyal analog disaring/di-filter untuk menghaluskan dan menghapus
komponen frekuensi tinggi yang tidak diinginkan.

Gambar 1. Sebuah
blok diagram sederhana dari real time filter digital dengan input analog dan
sinyal output
Filter
digital memainkan peran yang sangat penting dalam DSP. Dibandingkan dengan filter analog mereka lebih disukai dalam
sejumlah aplikasi (sebagai contoh untuk kompresi data yang cukup besar, pemrosesan
sinyal biomedis, pemrosesan suara, pemrosesan gambar, transmisi data, audio
digital, pembatalan gema telepon) karena satu atau lebih dari keuntungan
berikut. dengan filter analog mereka lebih disukai dalam
sejumlah aplikasi (sebagai contoh untuk kompresi data yang cukup besar, pemrosesan
sinyal biomedis, pemrosesan suara, pemrosesan gambar, transmisi data, audio
digital, pembatalan gema telepon) karena satu atau lebih dari keuntungan
berikut.
1. Filter
digital dapat memiliki karakteristik yang mana tidak mungkin terdapat pada filter analog, seperti respon fasa yang benar-benar linier.
2. Tidak
seperti filter Analog, kinerja dari filter digital tidak terpengaruh dengan perubahan lingkungan, misalnya variasi suhu. Ini
menghilangkan kebutuhan untuk mengkalibrasi secara berkala.
3. Respons
frekuensi suatu filter digital dapat secara otomatis disesuaikan jika diimplementasikan menggunakan prosesor yang dapat
diprogram, itulah sebabnya mengapa mereka secara luas digunakan pada filter adaptif.
4. Beberapa
masukan sinyal atau saluran dapat disaring oleh satu filter digital tanpa perlu mereplikasi perangkat keras.
5. Kedua data
yang di-filter dan tidak di-filter dapat disimpan untuk penggunaan lebih
lanjut.
6. Keuntungan
dapat dengan mudah diambil dari kemajuan teknologi VLSI yang luar biasa untuk
membuat filter digital dalam ukuran kecil, dengan konsumsi daya rendah, dan
untuk mempermurah biaya.
7. Pada prakteknya,
filter analog mempunyai ketelitian/presisi yang terbatas; sebagai contoh
biasanya atenuasi stopband maksimal hanya sekitar 60 sampai 70 dB. Dengan
filter digital, ketelitian/presisi dibatasi hanya oleh penggunaan panjang bit.
8. Kinerja dari
filter digital berulang dari unit ke unit atau tetap stabil.
9. Filter
digital dapat digunakan pada frekuensi yang sangat rendah, ditemukan pada
beberapa aplikasi biomedis misalnya, dimana penggunaan filter analog tidak
praktis. Juga, filter
digital dapat dibuat untuk bekerja pada rentang frekuensi yang luas dengan cara
merubah frekuensi sampling.
Berikut ini adalah kerugian utama dari filter digital
dibandingkan dengan filter analog:
- Batasan kecepatan Bandwidth maksimum sinyal yang dapat ditangani oleh filter digital. Dalam situasi real-time, proses konversi analog-digital-analog memperkenalkan kendala kecepatan pada kinerja filter digital. Waktu konversi ADC dan waktu penyelesaian DAC membatasi frekuensi tertinggi yang dapat diproses. Lalu, kecepatan pengoperasian filter digital tergantung pada kecepatan prosesor digital yang digunakan dan pada jumlah operasi aritmatika yang harus dilakukan untuk algoritme penyaringan, yang meningkat saat respons filter dibuat lebih ketat.
- Efek finite wordlength Filter digital dikenakan noise ADC yang dihasilkan dari kuantisasi sinyal kontinyu, dan untuk membulatkan kebisingan yang terjadi selama komputasi.
- Desain dan pengembangan yang membutuhkan waktu yang lama. Namun, setelah mengembangkan perangkat keras dan / atau perangkat lunak dapat digunakan untuk tugas-tugas penyaringan atau DSP lain dengan sedikit atau tanpa modifikasi (beberapa contoh ini diberikan dalam bab-bab berikutnya). Dukungan bantuan komputer (CAD) yang bagus dapat membuat desain filter digital menjadi tugas yang menyenangkan, tetapi beberapa keahlian diperlukan untuk membuat penggunaan alat bantu desain yang lengkap dan efektif.
s 6.2 Macam-macam digital filter :FIR dan IIR
Filter digital
secara luas dibagi menjadi dua kelas, yaitu respon impuls tak terbatas (IIR)
dan filter respons impuls (FIR). Entah jenis filter, dalam bentuk dasarnya,

Dapat
direpresentasikan oleh urutan respon impulsnya, h (k) (k = 0,1,..), Seperti
pada Gambar 6.2, Sinyal input dan output ke filter terkait dengan jumlah
konvolusi, yang diberikan dalam Persamaan 6.1 untuk IIR dan 6.2 untuk filter
FIR.
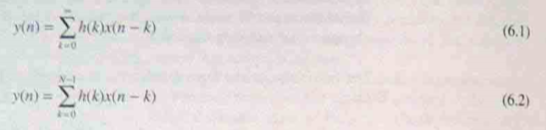
Hal ini terbukti
dari persamaan ini bahwa, untuk filter IIR, respon impuls adalah durasi yang
tak terbatas sedangkan untuk FIR adalah durasi init, karena h (k) untuk FIR
hanya memiliki nilai N. Dalam prakteknya, tidak layak untuk menghitung output
dari filter IIR menggunakan Persamaan 6.1 karena panjangnya, respon impuls
terlalu panjang (tak terbatas dalam teori). Sebaliknya, persamaan penyaringan
IIR diekspresikan dalam bentuk rekursif:
Dimana ak dan bk
adalah koefisien filter. Dengan demikian, Persamaan 6.2 adalah
perbedaan untuk filter FIR dan IIR masing-masing. Persamaan itu, dan khususnya
nilai-nilai h (k), untuk FIR, atau ak dan bk untuk IIR, seringkali merupakan
tujuan yang sangat penting dari sebagian besar masalah desain filter. Kami
mencatat bahwa, sampel keluaran saat ini, yaitu IIR adalah
sistem umpan balik dari beberapa macam. Ini harus dibandingkan dengan persamaan
FIR di mana sampel keluaran saat ini, y (n), adalah fungsi hanya dari nilai
input yang lalu dan sekarang. Perhatikan, bagaimanapun, bahwa ketika bk diatur
ke nol akan mengurangi ke FIR Persamaan 6.2.
Seperti yang akan
menjadi jelas dalam beberapa bagian berikutnya, faktor-faktor yang mempengaruhi
pilihan opsi terbuka untuk desainer filter digital pada setiap tahap proses
desain sangat terkait dengan apakah filter yang dimaksud adalah IIR atau FIR.
Dengan demikian, sangat penting untuk menentukan perbedaan antara IIR dan FIR,
karakteristik khas mereka, dan yang lebih penting, bagaimana memilih di antara
keduanya.
6.3 Langkah-langkah Perancangan Filter
Desain filter
digital melibatkan lima langkah:
1. Spesifikasi
persyaratan filter.
2. Perhitungan
koefisien filter yang sesuai.
3. Keterwakilan
filter dengan struktur yang sesuai (realisasi)
4. Analisis efek
panjang kata hingga pada kinerja filter.
5. Implementasi
filter dalam perangkat lunak dan / atau perangkat keras.
Pendekatan yang
dibahas di sini memberikan panduan langkah demi langkah yang sederhana yang
akan memastikan desain yang sukses. Untuk sampai pada filter yang efisien,
mungkin perlu literasi beberapa kali di antara langkah-langkah, terutama jika
spesifikasi masalah tidak kedap air, seperti yang sering terjadi, atau jika
perancang ingin menjelajahi desain lain yang mungkin.
6.3.1 Spesifikasi persyaratan filter
Spesifikasi
kebutuhan termasuk menentukan (i) karakteristik sinyal (jenis sumber sinyal dan
sink, antarmuka I / O, kecepatan dan lebar data, dan frekuensi tertinggi), (ii)
karakteristik filter (amplitudo dan / atau fase yang diinginkan) tanggapan dan
toleransi mereka (jika ada), kecepatan operasi dan mode penyaringan (waktu
nyata atau batch)), (iii) cara pelaksanaan (misalnya, pilihan prosesor sinyal),
dan (iv) kendala desain lainnya ( misalnya, biaya filter), perancang mungkin
tidak memiliki cukup informasi untuk menentukan filter sepenuhnya pada
permulaan, tetapi karena banyak persyaratan filter mungkin harus ditentukan
untuk menyederhanakan proses desain.
6.3.2 Perkiraan koefisien
Pada langkah ini,
kita memilih salah satu dari sejumlah metode perkiraan dan menghitung nilai
koefisien, h (k), untuk FIR, atau ak dan bi; untuk IIR, sehingga karakteristik
filter yang diberikan bisa dipenuhi. Metode yang digunakan untuk menghitung
koefisien filter tergantung pada apakah filter adalah tipe IIR atau FIR.
Perhitungan koefisien
filter IIR secara tradisional didasarkan pada transformasi karakteristik filter
analog yang dikenal menjadi filter digital setara. Dua metode dasar yang
digunakan adalah metode invarian impuls dan bilinear transformasi. Dengan
metode invarian impuls, setelah digitalisasi filter analog, respons impuls dari
filter analog asli dipertahankan, tetapi bukan respon frekuensi besarnya.
Karena aliasing yang melekat, metode ini tidak sesuai untuk filter highpass
atau bandstop. Metode bilinear, di sisi lain, menghasilkan filter yang sangat
efisien dan sangat cocok untuk menghitung koefisien filter selektif frekuensi. Ini
memungkinkan desain filter digital dengan karakteristik klasik yang diketahui
seperti Butterworth, Chebyshev dan eliptik. Filter digital yang dihasilkan dari
metode bilinear transform akan, secara umum, mempertahankan karakteristik
respons magnitudo dari filter analog tetapi bukan properti domain waktu.
6.3.3 Representasi filter dengan struktur yang sesuai
Realisasi
melibatkan konversi fungsi transfer yang diberikan, H (z), menjadi struktur
filter yang sesuai. Block atau flow diagram sering digunakan untuk
menggambarkan struktur filter dan mereka menunjukkan prosedur komputasi untuk
mengimplementasikan filter digital. Struktur yang digunakan tergantung pada
apakah filter adalah filter IIR atau FIR.
Untuk filter IIR,
tiga struktur yang umum digunakan adalah bentuk langsung, kaskade dan bentuk
paralel. Bentuk langsung hanyalah representasi langsung dari fungsi transfer
IIR. Dalam bentuk kaskade, fungsi transfer dari filter IIR, diperhitungkan dan
dinyatakan sebagai produk dari bagian orde kedua. Dalam bentuk paralel, H (z)
diperluas, menggunakan pecahan parsial, sebagai jumlah dari bagian orde kedua.
Set fungsi transfer yang sesuai dan persamaan perbedaan yang menggambarkan
struktur filter juga diberikan dalam gambar.
Struktur paralel
dan kaskade adalah yang paling banyak digunakan untuk IIR karena mereka
mengarah ke algoritma penyaringan yang lebih sederhana dan jauh lebih sedikit
peka terhadap efek penerapan filter menggunakan jumlah bit yang terbatas
daripada struktur langsung. Struktur langsung mengalami masalah sensitivitas
koefisien yang parah, terutama untuk filter tingkat tinggi, dan harus dihindari
dalam kasus ini.
Struktur yang
paling banyak digunakan untuk FIR adalah bentuk langsung. Dalam bentuk ini, FIR
kadang-kadang disebut garis tunda yang disadap (karena ini menyerupai garis
penundaan yang disadap) atau filter transversal. Dua struktur FIR lain yang
juga digunakan adalah struktur sampling frekuensi dan teknik konvolusi cepat.
Dibandingkan dengan struktur transversal, struktur sampling frekuensi dapat
secara komputasi lebih efisien karena mengarah pada koefisien yang lebih
sedikit, tetapi mungkin tidak sesederhana untuk diterapkan dan akan membutuhkan
lebih banyak penyimpanan
6.3.4 Efek wordlength
Efek dari
penggunaan sejumlah bit terbatas adalah untuk menurunkan kinerja filter dan
dalam beberapa kasus membuatnya tidak dapat digunakan. Perancang harus
menganalisis efek ini dan memilih wordlength yang sesuai (yaitu, jumlah bit)
untuk koefisien filter, variabel filter, yaitu sampel input dan output, dan
untuk operasi aritmatika dalam filter.
Sumber utama
penurunan kinerja dalam filter digital adalah sebagai berikut.
• Kuantisasi
sinyal input / output. Khususnya, noise ADC karena kuantisasi dari
sampel-sampel sinyal input adalah signifikan (lihat Bab 1 untuk perincian).
• Koefisien
kuantisasi. Hal ini menyebabkan penyimpangan dalam respon frekuensi dari filter
FIR dan UR, dan mungkin ketidakstabilan dalam filter UR.
• Kesalahan
pembulatan aritmatika. Penggunaan aritmatika presisi terbatas untuk melakukan
operasi penyaringan menghasilkan hasil yang membutuhkan bit tambahan untuk
mewakili. Ketika ini terkuantisasi ke wordlength yang diizinkan, sering dengan
pembulatan, suara roundoff adalah hasilnya. Ini dapat menyebabkan efek yang tidak
diinginkan seperti ketidakstabilan dalam filter IIR.
• Melimpah. Ini
terjadi ketika hasil penambahan melebihi panjang kata yang diijinkan. Ini
menyebabkan sampel output salah dan kemungkinan ketidakstabilan dalam filter
IIR.
6.3.5 Penerapan pada filter
Setelah menghitung
koefisien filter, memilih struktur yang sesuai, dan memverifikasi bahwa
degradasi filter, setelah mengukur koefisien dan variabel filter ke wordlength
yang dipilih, dapat diterima, persamaan perbedaan harus diimplementasikan
sebagai perangkat lunak rutin atau dalam perangkat keras. Apapun metode
pelaksanaannya, output dari filter harus dihitung, untuk setiap sampel, sesuai
dengan persamaan perbedaan (dengan asumsi implementasi domain waktu).
Ketika pengujian
persamaan perbedaan akan ditampilkan perhitungan y (n) (output filter) hanya
melibatkan perkalian, penambahan / pengurangan, dan penundaan. Jadi untuk
menerapkan filter, kita membutuhkan blok bangunan dasar berikut:
• memori (misalnya
ROM) untuk menyimpan koefisien filter;
• memori (seperti
RAM) untuk menyimpan input dan output saat ini dan yang lalu, yaitu {x (n), x
(n - 1), ...} dan {y (n), y (n - 1), ...};
• pengganda
perangkat keras atau perangkat lunak (s);
• unit logika
adder atau aritmatika.
Perancang
menyediakan blok dasar ini dan juga memastikan bahwa mereka dikonfigurasi
sesuai untuk aplikasi. Cara di mana komponen dikonfigurasikan sangat tergantung
pada apakah batch (yaitu, non-real-time) atau pemrosesan real-time diperlukan.
Dalam pemrosesan batch, seluruh data sudah tersedia di beberapa perangkat
memori. Seperti halnya dalam aplikasi di mana, misalnya, data eksperimen
diperoleh dari tempat lain untuk analisis nanti. Dalam kasus ini, filter sering
diimplementasikan dalam bahasa tingkat tinggi dan berjalan di komputer tujuan
umum, seperti komputer pribadi atau komputer mainframe, di mana semua blok
dasar sudah dikonfigurasikan. Dengan demikian, pemrosesan batch dapat
digambarkan sebagai implementasi perangkat lunak murni (meskipun perancang mungkin
ingin menggabungkan perangkat keras tambahan untuk meningkatkan kecepatan
pemrosesan).
6.4 Ringkasan
Istilah filter
digital mengacu pada implementasi perangkat keras atau perangkat lunak dari
algoritma matematika yang menerima, sebagai input, sinyal digital, dan menghasilkan
keluaran sinyal digital lain yang memiliki bentuk gelombang dan / atau
amplitudo dan respons fase yang telah dimodifikasi dengan cara tertentu. Dalam
banyak aplikasi, penggunaan filter digital lebih disukai daripada filter analog
karena mereka dapat memenuhi spesifikasi skala dan skala yang lebih ketat, yang
menghilangkan suhu, dan tegangan drift umum dengan filter analog.
Kami telah
memberikan dalam bab ini kerangka kerja umum untuk merancang filter FIRj dan
IIR, dari spesifikasi hingga implementasi. Prosedur langkah-demi-langkah
sederhana untuk merancang filter ini melibatkan lima langkah kunci: (i)
spesifikasi filter, (ii) perhitungan koefisien filter yang sesuai, (iii)
realisasi filter: menggunakan struktur yang sesuai, (iv) kuantisasi filter
koefisien dan variabel untuk wordlengths yang sesuai dan analisis setiap
kesalahan yang dihasilkan, dan, akhirnya, (v) implementasi yang berkaitan
dengan perangkat keras atau pengkodean perangkat lunak! filter dalam prosesor
yang akan melakukan penyaringan aktual pada data masukan.
Terima kasih atas perhatiannya, mohon maaf apabila ada kesalahan pengetikan, pemahaman, dan penyampaian materi dalam bentuk tulisan dalam postingan ini. Wassalamualaikum W. W.
Penyusun :



Penyusun :



