RESUME BAB 7 "METODE FREKUENSI SAMPLING"
7.7 Metode Frekuensi
Sampling
Metode sampling
frekuensi memungkinkan kita untuk merancang nonrecursive FIR filter untuk
frekuensi standar selektif filter (lowpass, highpass, bandpass filter) dan
filter dengan respon frekuensi yang berubah-ubah. Daya tarik unik metode sampling frekuensi adalah bahwa
hal itu juga memungkinkan pelaksanaan rekursif FIR filter, mengarah ke mesin
efisien filter. Dengan beberapa pembatasan, rekursif FIR filter koefisien yang
adalah bilangan bulat sederhana dapat dirancang, yang menarik ketika hanya operasi aritmetika primitif yang memungkinkan, seperti dalam
sistem yang dilaksanakan dengan standar mikroprosesor.
7.7.1 Nonrecursive Frekuensi Sampling Filter
Misal kita
ingin memperoleh koefisien FIR filter respon frekuensi yang digambarkan dalam
gambar 7.16(a). Kita dapat memulai dengan mengambil sampel N respon frekuensi
interval ![]() . H(n)
koefisien filter dapat diperoleh sebagai invers DFT sampel frekuensi:
. H(n)
koefisien filter dapat diperoleh sebagai invers DFT sampel frekuensi:

Dimana ![]() adalah contoh
ideal atau target respon frekuensi.
adalah contoh
ideal atau target respon frekuensi.

Gambar
7.16 Konsep frekuensi
sampling. (a) respon
frekuensi penyaring ideal lowpass. (b) sampel filter ideal lowpass. (c)
frekuensi respon filter lowpass yang berasal dari sampel frekuensi (b).
Dapat
ditunjukkan (Lihat contoh 7,9) bahwa filter fase linier, dengan respon positif
impuls simetris, kita dapat menulis (untuk N genap),

Dimana ![]() . N ganjil,
batas atas kesimpulannya adalah (N-1) / 2. Filter dihasilkan akan memiliki
respon frekuensi yang tepat sama seperti respon asli di sampling instants.
Namun, antara instants sampel, respons mungkin akan sangat berbeda (gambar
7.16(c)). Untuk mendapatkan baik digunakan untuk respon frekuensi yang
diinginkan, dengan jelas kita harus mengambil jumlah frekuensi sampel yang
memadai.
. N ganjil,
batas atas kesimpulannya adalah (N-1) / 2. Filter dihasilkan akan memiliki
respon frekuensi yang tepat sama seperti respon asli di sampling instants.
Namun, antara instants sampel, respons mungkin akan sangat berbeda (gambar
7.16(c)). Untuk mendapatkan baik digunakan untuk respon frekuensi yang
diinginkan, dengan jelas kita harus mengambil jumlah frekuensi sampel yang
memadai.
Frekuensi
alternatif sampling filter, dikenal sebagai tipe 2, hasil jika kita mengambil
sampel frekuensi interval
![]()
Gambar 7,17
membandingkan sampling grid untuk kedua jenis skema frekuensi sampling. Untuk
spesifikasi filter tertentu, kedua metode akan mengakibatkan tanggapan
frekuensi yang agak
berbeda.
Desainer perlu memutuskan mana dari dua jenis terbaik sesuai dengan
kebutuhannya.
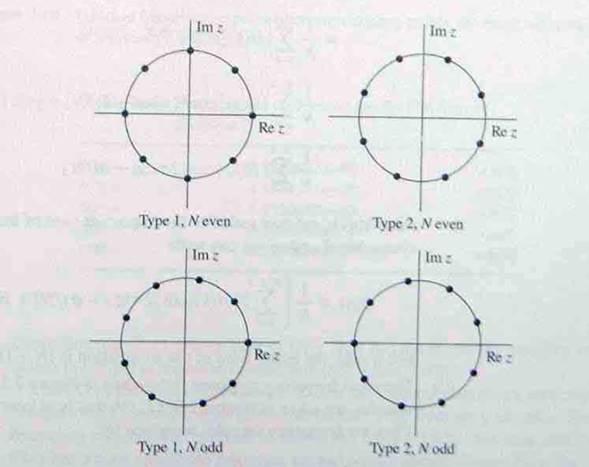
Gambar
7,17 Empat kemungkinan z-plane sampling grid untuk dua jenis
frekuensi sampling filter.
7.7.1.1 Mengoptimalkan Respon Amplitudo
Untuk
meningkatkan respon amplitudo frekuensi sampling filter, dengan mengorbankan
transisi lebih luas, kita dapat memperkenalkan frekuensi sampel di band
transisi. Gambar 7,19 menggambarkan sebuah spesifikasi yang khas untuk filter
lowpass dengan tiga transisi band frekuensi sampel. Untuk lowpass filter,
stopband redaman meningkat, sekitar 20 dB untuk setiap transisi band frekuensi
sampel (Rabiner et al., 1970), dengan sebuah sesuai peningkatan lebar transisi:
stopband
perkiraan atenuasi (25 + 20 M) dB
perkiraan
transisi lebar (M + 1) F, / N
di mana M
adalah jumlah transisi band frekuensi sampel dan N adalah panjang filter.
Nilai-nilai
transisi band frekuensi sampel yang akan memberikan redaman yang optimal
stopband ditentukan oleh proses optimasi (Rabiner et al., 1970). Tujuan berguna
optimasi adalah untuk mencari nilai tangan transisi sampel frekuensi, ![]() yang
meminimalkan puncak stopband riak (yaitu mereka memaksimalkan redaman
stopband). Secara matematis, ini dapat dinyatakan sebagai:
yang
meminimalkan puncak stopband riak (yaitu mereka memaksimalkan redaman
stopband). Secara matematis, ini dapat dinyatakan sebagai:

Dimana ![]() adalah,
masing-masing, tanggapan frekuensi ideal dan aktual dari filter, W adalah
faktor bobot.
adalah,
masing-masing, tanggapan frekuensi ideal dan aktual dari filter, W adalah
faktor bobot.
Rabiner et al. (1970) telah menyediakan tabel yang
optimal (dalam arti Persamaan 7.22) nilai-nilai sampel pita frekuensi transisi
yang banyak digunakan. Sampel dari nilai-nilai optimal dari sampel pita
frekuensi transisi diberikan pada Tabel 7.11 untuk

Gambar
7.19 Sampel frekuensi filter lowpass termasuk tiga sampel pita transisi.
Catatan: karena simetri dalam respons amplitudo hanya separuh respon filter
yang ditampilkan.
Tabel 7.11 Sampel pita frekuensi
transisi optimal untuk tipe 1 filter sampling frekuensi lowpass untuk N = 15.

BW
mengacu pada jumlah sampel frekuensi dalam passband.
N
= 15. Dalam tabel, bandwidth mengacu pada jumlah sampel frekuensi dalam
passband filter.
Dalam
kebanyakan kasus, nilai-nilai sampel frekuensi tangan transisi biasanya
terletak pada rentang berikut: untuk satu sampel frekuensi transisi.
0.250 <
T < 0.450
Untuk dua transisi sample frekuensi,
0.040<T1
<0.150
0.450 <
T2 < 0.650
Untuk tiga transisi sampel
frekuensi,
0.003 <
T1 < 0.035
0.100 <
T2 < 0.300
0.550 <
<0.750
Nilai
yang lebih rendah adalah untuk filter dengan lebar pita lebar dan menyebabkan
lebih banyak redaman stopband.
7.7.1.2 Desain Otomatic dari
Frekuensi Sampling
Tabel nilai-nilai optimal transisi band
frekuensi sampel tersedia dalam literatur (Rabiner et di, 1970) dan secara luas
digunakan untuk merancang frekuensi sampling filter. Jika perancang ingin
filter tidak ditabulasikan, nilai-nilai
perkiraan transisi band frekuensi sampel dapat diperoleh oleh interpolasi
linier, tetapi hal ini tidak selalu mungkin, terutama jika desain melibatkan
sejumlah besar transisi band sampel. Program komputer tujuan umum baru-baru ini
telah dikembangkan untuk mengotomatisasi berbagai aspek dari desain
nonrecursive dan rekursif frekuensi sampling filter (Ifeachor dan Harris, 1993:
Harris dan lfeachor, 1998).
7.7.2 Rekursif Frekuensi Sampling Filter
Dapat
ditunjukkan (Lihat contoh 7,12) bahwa fungsi transfer FIR filter H(z), dapat
dinyatakan dalam bentuk rekursif:

Dimana
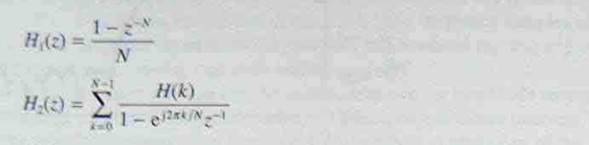
Masalah
kestabilan dapat dihindari dengan sampling H(z) di radius, r sedikit kurang
dari kesatuan. Dengan demikian fungsi transfer dalam hal ini menjadi

Untuk frekuensi
standar fase linier selektif filter (dorongan simetris positif respon), dapat
ditunjukkan (Lihat contoh 7,12) bahwa persamaan 7.24 dapat dinyatakan sebagai

di manadan untuk N genap M = N / 2-1. Diagram realisasi untuk Persamaan 7.25 digambarkan pada Gambar 7.22.
7.7.3 Filter Frekuensi Sampling Dengan
Koefisien Sederhana
Pelaksanaan
rekursif dari filter FIR greatle mengurangi jumlah operasi aritmatika dalam
filter digital.
Jika filter selain memiliki koefisien yang bilangan
bulat sederhana
(Atau pangkat dari 2) efisiensi
komputasi adalah greatle ditingkatkan, sehingga menarik dalam aplikasi di mana
prosesor dengan operasi aritmatika primitif, seperti mikroprosesor biasa,
digunakan. Lynn
(1975) telah mengembangkan keluarga filter sampling frekuensi dengan koefisien
bilangan bulat kecil.

Jelas
bahwa penentuan fungsi transfer untuk frekuensi sampling dengan koefisien
integer adalah proses yang sangat sederhana. Namun,
respon amplitudo filter seperti itu sering buruk dan perancang dibatasi di mana
paspor dapat ditemukan. Untuk meningkatkan
karakteristik frekuensi atenuasi dan cutoff filter ini, transfer fuction dapat
dinaikkan ke nilai integer (Lynn , 1973, 1975).
7.7.4 Ringkasan Metode Sampling
Frekuensi
Langkah 1 Tentukan respons frekuensi ideal atau yang diinginkan, atenuasi stopband
dan frekuensi bandangan dari filter target.
Langkah 2 dari spesifikasi pilih tipe 1 filter frekuensi
sampling, mana frekuensi sampel yang diambil pada interval kF n, atau filter
frekuensi sampling tipe 2, yang mana frekuensi sampel yang diambil pada
interval (k + ½) F/N.
Langkah 3 menggunakan spesifikasi dalam langkah 1 dan
desain meja (Rabiner et al., 1970) untuk menentukan N, jumlah frekuensi sampel
respon frekuensi yang ideal, M, jumlah transisi band frekuensi sampel, BW,
jumlah frekuensi sampel di passband , dan T, nilai-nilai transisi band
frekuensi sampel (saya = 1, 2,..., M).
Langkah 4 menggunakan persamaan sesuai untuk menghitung
koefisien filter.
Atau program
berbasis komputer yang menggunakan algoritma genetik dapat digunakan untuk
melaksanakan langkah 2 ke 4 (Harris dan Ifeachor, 1998).
7.8 Perbandingan Jendela, Optimal Dan Frekuensi Metode Sampling
Metode optimal
menyediakan cara yang mudah dan efisien komputasi FIR filter koefisien. Untuk
sebagian besar aplikasi metode optimal akan menghasilkan filter dengan baik
amplitudo karakteristik respon untuk nilai-nilai yang masuk akal metode N.
Dengan tidak adanya perangkat lunak yang optimal atau ketika riak passband dan stopband sama, metode jendela mewakili pilihan yang baik. Ini adalah metode yang sangat sederhana untuk diterapkan dan secara konseptual mudah dimengerti. Namun, metode optimal akan sering memberikan solusi yang lebih ekonomis dalam hal jumlah koefisien filter. Metode window tidak memungkinkan desainer mengontrol secara tepat frekuensi cutoff atau riak di passband dan stopband.
Pendekatan sampling frekuensi adalah satu-satunya metode yang memungkinkan penerapan filter FIR non-rekursif dan rekursif, dan harus digunakan ketika implementasi seperti itu dibayangkan sebagai pendekatan rekursif yang ekonomis secara komputasi. Khusus dari dengan koefisien integer harus dipertimbangkan hanya ketika aritmatika primitif dan pemrograman dalam mikroprosesor standar), tetapi pemeriksaan harus selalu dilakukan untuk melihat apakah respon amplitudonya buruk dapat diterima. Contoh 7.14
Dua filter FIR bandpass fase linier diperlukan untuk memenuhi spesifikasi berikut: untuk filter 1.
Passband 8-12 khz
stopband ripple 0.001
peak passband ripple 0.001
sampling frequency 44.14
kHz
transition width 3
kHz
Dan
untuk filter 2,
passband 8-12
kHz
stopband riak 0,001
puncak riak passband 0,001
frekuensi sampling 44,14 kHz
lebar transisi 3 kHz
Memperoleh
dan membandingkan respon frekuensi untuk masing-masing filter menggunakan
(1) Jendela
metode,
(2) Metode
pengambilan sampel frekuensi, dan
(3) Metode
yang optimal
Solusi
(1) metode jendela Untuk filter 1,
dari spesifikasi passband riak adalah 20 log (1 + 0,001) = 0,008 68 dB redaman
stopband adalah -20 log (0,001) = 60 dB. Dari Persamaan 7.10 dan 7.11 parameter
untuk jendela Kaiser adalah
frekuensi
cutoff 6,5 kHz,
13,5 kHz
parameter
riak, β 5,653
Jumlah
koefisien filter 53
frekuensi
sampling 44,14 kHz

Untuk
filter 2, hasilnya adalah sama untuk filter saya
karena dalam metode jendela passband dan stopband riak selalu kurang lebih
sama.
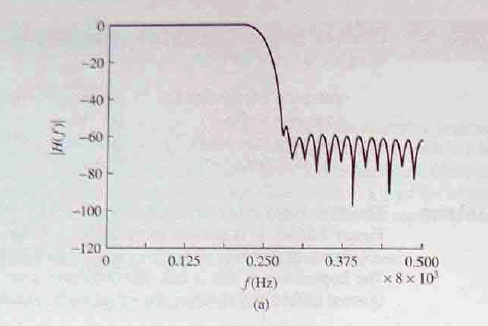
Spektrum
Filter yang dihasilkan diberikan pada Gambar 7.25 (a).
(2) metode sampling
Freuency Untuk
filter 1, kami mengasumsikan tipe 1 sampel filter, dan filter panjang, N,
dipilih sebagai 53, sama seperti untuk metode jendela. Dari desain-tabel
(Rabiner et al., 1970), kami menemukan bahwa kami memerlukan dua sampel
frekuensi band transisi untuk mencapai redaman stopband yang diinginkan dari 60
dB, dengan Fs = 44,14 kHz, M = 2, N = 53. Sampling
dari respon frekuensi yang ideal, untuk N = 53, memberikan
![]() k =
0, 1, ...., 7
k =
0, 1, ...., 7
0,106 89 k = 8
0,592 53 k = 9
1 k =
10-14
0,592 53 k = 15
0,106 89 k = 16
0 k =
17-26
Menggunakan
program fresamp.c (lihat lampiran), filter diperoleh dan respon frekuensi yang
sesuai digambarkan pada Gambar 7,25 (b).
karena
stopband pelemahan adalah sama untuk kedua filter, filter 2 adalah sama sebagai
filter 1.
(3) Metode
optik Untuk filter 1, dari spesifikasi frekuensi bandedge dinormalisasi adalah
0, 5 / 44,14, 8 / 44,14, 12 / 44,14, 15 / 44,14 dan 22,07 / 44,14, yaitu 0,
0,113 28, 0,181 24, 0,271 86, 0,339 83 dan 0,5. menggunakan
program dalam lampiran, kita menemukan N = 49,6. karena
kedua pass band dan stopband riak adalah sama, bobot di tiga band yang sama.
Parameter input ke program desain yang optimal adalah
jumlah
koefisien penyaring 49
frekuensi
bandedge 0,
0,113 28, 0,181 24, 0,271 86, 0,339 83, 0,5
bobot 5, 5, 5
Parameter
input untuk filter 2 adalah
jumlah
koefisien penyaring 39 (39,45)
frekuensi
bandedge 0,
0,113 28, 0,181 24, 0,271 86, 0,339 83, 0,5
bobot 10, 1, 10
tanggapan
frekuensi yang dihasilkan untuk metode yang optimal ditunjukkan pada Gambar
7.25 (c) dan 7,25 (d).
7.9 FIR Khusus Topik Desain Filter
7.9.1 Filter FIR
Half-Band
Half-band
filter adalah jenis khusus dari filter FIR. Fitur menarik utama filter
half-band adalah bahwa hampir setengah koefisien filter adalah nol yang
mengarah ke pengurangan upaya komputasi dengan faktor 2. Fitur ini membuat
setengah-band filter yang menarik dalam aplikasi seperti pengolahan multirate
mana ada kebutuhan untuk efisien penyaringan anti-aliasing dan / atau
penyaringan anti-image untuk mengubah sampling rate data.
filter half-band
kausal dicirikan oleh fitur berikut:
(1) Passband
dan stopband riak adalah sama, yaitu
![]() (7.33)
(7.33)
(2) Passband
dan stopband tepi frekuensi berhubungan dengan cara berikut:
![]() (7.34)
(7.34)
(3) Respon
frekuensi simetris sekitar seperempat dari frekuensi sampling. Artinya, di![]()
![]() (7.35)
(7.35)
Juga
pada frekuensi ini, respon frekuensi dinormalisasi turun dengan faktor 2,
yaitu:
![]()
(4) Dalam
respon impuls satuan, untuk N aneh, setiap koefisien lainnya adalah nol kecuali:![]()
![]()
![]() (7.36)
(7.36)
0,5, ![]()
Koefisien
dari filter setengah-band dapat diperoleh dengan menggunakan metode FIR
dijelaskan ealier, seperti jendela dan metode yang optimal. Dalam menggunakan
metode, kendala yang diberikan dalam Persamaan 7.33 dan 7.34 harus dikenakan.

Gambar
7.26 (A) Respon frekuensi dari
setengah-band lowpass filter, (b) Frequencyresponse dari (i) filter lowpass
ideal dan (ii) dan setara yang ideal penyaring highpass.
7.9.2 Transformasi
Frekuensi
Sebuah
hubungan yang sederhana ada antara lowpass dan highpass filter yang
memungkinkan perubahan tersebut. Koefisien dari filter FIR highpass dapat
trivial diperoleh dari orang-orang dari filter lowpass setara dengan mengubah
tanda-tanda koefisien sebagai berikut:
![]() (7.37)
(7.37)
Hubungan
ini didasarkan pada pengetahuan bahwa respon frekuensi tinggi-pass filter
adalah sama dengan filter lowpass tapi frekuensi
diterjemahkan oleh setengah frekuensi sampling (lihat Gambar 7.26 (b)).
Sehingga respon frekuensi highpass filter dapat diperoleh dari yang lowpass
dengan mengganti f oleh Fs / 2-f:
![]() (7.38)
(7.38)
7.9.3 Komputasi
Filter FIR Efisien
Dalam
sistem kontrol, misalnya, penggunaan filter seperti di dalam loop umpan balik
dapat menyebabkan ketidakstabilan. Dalam kasus seperti filter fase minimum
mungkin lebih tepat (lihat Taman dan Burrus, 1987).
Karakteristik
equiripple dari metode yang optimal dapat menyebabkan gema dalam respon impuls
dari filter yang mungkin merupakan efek yang tidak diinginkan.
Dalam
aplikasi lain, seperti pengolahan gambar, jumlah operasi aritmatika ketika
filter FIR standar yang digunakan mungkin terlalu besar. Sayangnya, koefisien
bilangan bulat filter tidak cocok untuk aplikasi seperti itu karena lemah
karakteristik respon amplitudo mereka.
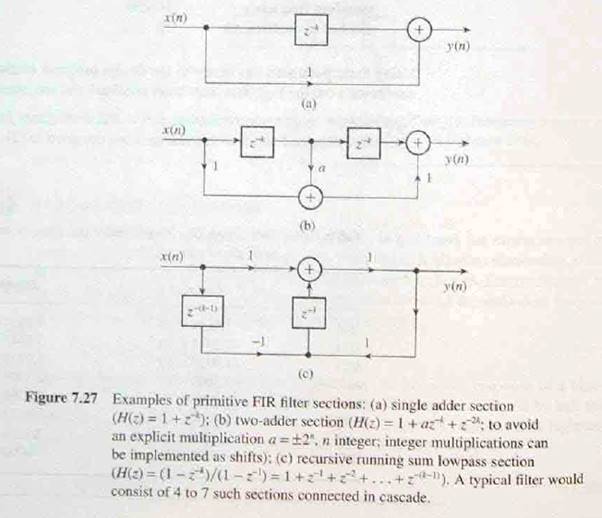
Dasar
dari metode ini adalah untuk kaskade dua atau lebih bagian penyaring SD seperti
yang ditunjukkan pada Gambar 7.27. Setiap bagian dasar melibatkan hampir
perkalian apapun.
Masalah
utama dengan metode ini termasuk sulitnya mencari cara
yang efisien untuk memilih bagian penyaring SD kaskade dan fakta bahwa hanya
filter dari urutan rendah dapat dirancang secara efisien. algoritma
genetika telah digunakan untuk mengatasi masalah (Suckley, 1990).
7.10 Struktur
Realisasi Untuk Filter FIR
FIR
filter ditandai dengan fungsi transfer, H (z), yang diberikan oleh
![]()
struktur
realisasi pada dasarnya memblokir (atau aliran) representasi diagram cara
teoritis setara berbeda fungsi transfer bisa diatur. Dalam kebanyakan kasus,
mereka terdiri dari interkoneksi pengganda, penambah / musim panas dan elemen
delay. Ada banyak struktur realisasi FIR, tetapi hanya mereka yang umum
digunakan disajikan di sini.
7.10.1 Struktur
Transveral
The
transversal (atau delay mengetuk) struktur digambarkan pada Gambar 7.28. Input,
x (n), dan output, y (n), filter untuk struktur ini terkait hanya dengan
![]() (7.39)
(7.39)
Dalam
gambar, simbol z-1 merupakan penundaan satu sampel atau satuan waktu. Jadi x
(n-1) adalah x (n) tertunda satu sampel. Dalam implementasi digital, kotak
berlabel

Gambar
7.28 struktur filter
transversal
z-1
bisa mewakili shift register atau lebih umum lokasi memori di RAM. Struktur
transversal filter struktur FIR paling populer.
Sampel
output, y (n), adalah jumlah tertimbang dari masukan ini, x (n), dan N-1 sampel
sebelumnya input, yaitu x (n-1) ke x (NN). Untuk struktur transversal,
perhitungan setiap sampel output, y (n), membutuhkan
§ N-1
lokasi memori untuk menyimpan N-1 sampel input,
§ lokasi
memori N untuk menyimpan koefisien N,
§ N
perkalian dan
§ N-1
penambahan.
7.10.2 Struktur Fase
Linier
Sebuah
variasi dari struktur transversal adalah struktur fase linier yang mengambil
keuntungan dari simetri dalam koefisien respon impuls untuk filter fase FIR
linear untuk mengurangi kompleksitas komputasi dari implementasi filter.
Untuk
tipe 1 dan 2 filter fase linier, fungsi transfer dapat ditulis sebagai

Persamaan
Perbedaan yang sesuai diberikan oleh

Perbandingan
Persamaan 7.39 dan 7.41 menunjukkan bahwa struktur fase linear komputasi lebih
efisien, membutuhkan sekitar setengah jumlah perkalian dan penambahan. Namun,
di sebagian besar prosesor DSP Persamaan 7.39 mengarah ke implementasi yang
lebih efisien, karena keuntungan komputasi dalam Persamaan 7.41 hilang dalam
pengindeksan lebih kompleks data tersirat.
7.10.3 Struktur Lainnya
7.10.3.1 Konvolusi Cepat
Metode konvolusi cepat melibatkan pelaksanaan konvolusi operasi Persamaan
7.39 dalam domain frekuensi. Seperti yang telah dibahas dalam Bab 5, konvolusi
dalam domain waktu sama dengan perkalian dalam domain frekuensi. Dalam istilah
sederhana, penyaringan di sini dilakukan dengan terlebih dahulu menghitung DFTs
dari x (n) dan h (n) (sesuai dengan zero padded), mengalikan ini bersama-sama
dan kemudian memperoleh inverse mereka.
7.10.3.2 Struktur Frekuensi Sampling
Dalam struktur sampling frekuensi, filter dicirikan oleh sampel dari respon
frekuensi yang dikehendaki, H (k), bukan koefisien respon impulsnya. Untuk
filter narrowband, sebagian besar sampel frekuensi akan nol, sehingga filter
sampling frekuensi yang dihasilkan akan memerlukan lebih sedikit koefisien dan
karenanya perkalian dan penambahan daripada struktur transversal yang setara.
7.10.3.3 Struktur Transpose dan
Kaskad
Struktur transpose mirip dengan struktur langsung, kecuali bahwa jumlah
parsial masuk ke tahap berikutnya. Metode ini lebih rentan terhadap suara ronde
daripada metode langsung. Dalam realisasi kaskade, fungsi transfer, H (z),
dinyatakan sebagai produk bagian orde kedua dan orde pertama. Struktur
transpose dan cascade jarang digunakan untuk filter FIR dalam implementasi DSP
saat ini.
7.10.4 Memilih Di Antara Struktur
Struktur
langsung sangat mudah untuk program dan efisien dilaksanakan oleh kebanyakan
chip DSP yang ini memiliki petunjuk dirancang untuk traversal FIR penyaringan.
Ini adalah struktur yang paling umum digunakan untuk menyadari nonrecursive
filter dan daya tarik utama adalah kesederhanaan, memerlukan minimal komponen
dan mengakses memori tidak rumit untuk data. Cascade kurang sensitif terhadap
koefisien kesalahan dan kebisingan kuantisasi, tetapi coefficiemts memerlukan
lebih banyak usaha untuk mendapatkan dan pemrograman tidak cocok dengan chip
DSP arsitektur. Struktur cepat lilitan menawarkan komputasi keuntungan
signifikan lebih dari yang lain, tetapi memerlukan ketersediaan FFT.
Struktur
sampling frekuensi, untuk narrowband frekuensi selektif filter, mesin lebih
efisien daripada struktur traversal setara. Untuk menghindari masalah
stabilitas tiang dan nol
struktur frekuensi sampling harus terletak sedikit di dalam unit lingkaran,
misalnya di jari-jari r = 0.99. Struktur ini adalah pilihan yang alami ketika
rekursif pelaksanaan FIR filter wajib. Struktur sangat modular dan cocok untuk
pemrosesan paralel.
Secara umum, struktur tranversal harus digunakan kecuali persyaratan
spesifikasi menentukan penggunaan struktur sampling frekuensi atau ada
kebutuhan untuk menghitung spektrum data juga ketika konvolusi cepat harus
digunakan.
Penyusun


