Resume BAB 14 Aplikasi dan Pembelajaran Desain
Jaman sekarang sangat dibutuhkan alat dimana bisa digunakan
untuk mengukur atau mengetahui kondisi sesuatu yang tidak bisa dilihat, maka
dibuat lah alat bernama DSP (Digital Signal Processor) yaitu yang berfungsi
menerima signal dari luar seperti signal suara, video, suhu, tekanan maupun
posisi yang telah dirubah menjadi signal digital dan melakukan perhitungan /
proses matematik terhadap signal tersebut.
Tujuan dari bab ini adalah empat hal. Yang pertama
adalah untuk menggambarkan beberapa board dengan biaya murah yang dapat
digunakan untuk mengimplementasikan algoritma DSP yang dijelaskan dalam bab
sebelumnya.
Tujuan kedua adalah untuk menggambarkan sejumlah
aplikasi OSP ke dunia nyata. Aplikasi yang dijelaskan di sini termasuk
pemrosesan sinyal audio real-time, penyaringan adaptif artefak dari
elektroensefalogram manusia (aktivitas listrik otak), dan deteksi detak jantung
janin dari elektrokardiogram (aktivitas listrik jantung).
Tujuan ketiga adalah menyajikan sejumlah masalah
praktis yang menantang yang dapat dilakukan dalam bentuk kelompok sebagai studi
desain.
Tujuan keempat adalah untuk mempersiapkan serangkaian
pertanyaan pilihan ganda untuk membantu pembaca dalam memperoleh wawasan yang
lebih mendalam tentang berbagai aspek DSP.
14.1
Evaluation boards for real-time signal processing
1 4.1 .1 Latar
Belakang
Sama seperti di bidang teknik pada umum nya.
Pengalaman praktikum dan mengimplementasikan algoritma DSP diperlukan untuk
mendapatkan apresiasi yang tepat terhadap masalah yang terlibat dalam DSP.
Mahasiswa teknik hanya dengan pengetahuan pemrosesan sinyal analog memiliki
akan kesulitan untuk mengatasi teknik yang terlibat dalam DSP.
Fitur utama dari papan adalah:
• standalone yang mampu mengeksekusi algoritma DSP
sederhana secara real time;
• Input / output analog tunggal didigitalkan menjadi 8
bit;
• Memungkinkan kode untuk algoritma DSP untuk
dimodifikasi dengan mudah;
• Mampu beroperasi dengan dua tingkat sampling berbeda;
• Memungkinkan studi tentang aliasing dan pencitraan.
Diagram blok sistem. ditunjukkan pada Gambar 14.1,
terdiri dari empat unit utama. Prosesor sinyal digital TMS320C 10 generasi
pertama yang merupakan inti dari sistem. unit ADC / DAC 8-bit, rangkaian waktu,
dan unit memori. Untuk sistem high fidelity, resolusi 8-bit tidak memadai,
tetapi untuk mendemonstrasikan prinsip-prinsip DSP yang ditemukan

Figure 14.1 A Block sederhana dari TMS320C10
Table 14.1 Program memory
selection.
Block
|
Address
|
DSP Programs
|
0
|
0000-03FF
|
Input-output
loop
|
1
|
0400-07FF
|
Noise
Generator
|
2
|
0800-0BFF
|
Square
wave generator
|
3
|
0C00-0FFF
|
41-point
bandpass FIR filter
|
4
|
1000-13FF
|
61-point
FIR notch filter
|
5
|
1400-17FF
|
Fourth-order
IIR lowpass filter in cascade
|
6
|
1800-1BFF
|
Fourth-order
IIR lowpass filter in parallel
|
7
|
1C00-1FFF
|
Fourth-order
IIR handpass filter in cascade
|
Unit memori terdiri dari tombol pilihan program dan
sepasang EPROM terpasang pada soket ZIF (zero insertion force) untuk penggunaan
yang mudah. EPROM dipartisi menjadi delapan blok setiap kata I k. dapat dipilih
melalui tombol pilihan program. Dapat dimasukkan hingga delapan program berbeda
di dalam EPROM. Untuk operasi, penggunaan EPROM tidak biasa digunakan namun
penggunaan eprom kadang digunakan. Dua frekuensi sampling dapat dipilih user
diantara nya, satu pada 7,5 kHz dan yang lainnya di I 3 kHz. Ini termasuk
filter FIR dan HR, generator gelombang suara dan persegi. Contohnya tercantum
dalam Tabel 14.1.
14.1
3 DSP56002
Modul evaluasi untuk DSP real-time TMS320C10 berguna
untuk didemonstrasikan fungsi DSP sederhana dalam mode standalone. tetapi
terbatas dalam tugas desain yang serius. Motorola DSP56002EVM adalah modul
evaluasi biaya rendah (EVM) yang berguna untuk desain cepat dan demonstrasi
sistem DSP real-time. Fitur EVM termasuk:
·
a 24-bit fixed-point DSP56002 processor;
·
32 k words of SRAM and optional 32 k bytes
of flash EEPROM for standalone operation;
·
CD quality audio CODEC (16-bit stereo A/D
and D/A);
·
Sampling rates of 48, 32. 16. 9.6 or 8
kHz;
·
Assembler and debugger.
Prosesor DSP memiliki dua 48-bit X dan Y register yang
juga dapat digunakan sebagai empat register 24-bit (X0. XI, Y0 dan YI). dua
akumulator 56-bit dan pengganda perangkat keras yang tidak ternilai dalam
pemrosesan sinyal.
14.1.4
TMS320C54 and DSP56300
Modul TMS320C54x (Texas Instruments, 1995) adalah
kartu plug-in berbasis PC yang dapat digunakan untuk menerapkan algoritma DSP
secara real time. Fitur utama dari EVM adalah:
• TMS320C541
16-bit, prosesor DSP fixed-point. dengan 5 k byte program/data on-chip RAM dan 28 k byte ROM
on-chip;
• Grafis. Berbasis
Windows, debugger:
• Dukungan emulasi
tertanam untuk C source debugger:
• Interface I / O analog.
Interface I / O
analog mendukung anti-aliasing dan anti-image filtering, kontrol dan laju
sampling amplitudo (hingga 43,2 kHz) yang dapat diprogram. Fitur utama dari EVM
DSP56302 meliputi:
• prosesor DSP56302 24-bit fixed-point DSP;
• onboard 32 k kata pemrograman / cache dan data RAM;
• dua saluran codec audio berkualitas CD (16-bit ADC /
DAC);
• cross-assembler dan debugger berbasis Windows.
14.2
Aplikasi DSP
14.2.1 Deteksi denyut jantung janin selama persalinan
Metode standar
pemantauan di dunia: janin selama persalinan adalah tampilan denyut jantung
janin (DJJ) secara terus menerus dan aktivitas uterus yang ikut membentuk
kardiotokogram (CTG (Gambar 14.2))..

Figure 14.2 Sebuah contoh dari cardiotocogram (CTG).
CTG menampilkan aktivitas detak jantung dan aktivitas uterine

Figure 14.3 The electrocardiogram
14.2.1.1
Elektrokardiogram inti
Denyut jantung janin
diperoleh selama persalinan dari elektrokardiogram (ECG) secara rutin. Aktivitas
listrik jantung (lihat Gambar 14.3) atau ultrasound. Seperti ECG dewasa. ECG
janin normal ditandai oleh lima puncak dan lembah berlabel huruf berurutan dari
huruf P, Q, R. S. dan T (Greene, 1987). Dengan demikian, ECG dikatakan terdiri
dari gelombang P, kompleks QRS dan gelombang T (Greene. 1987).
Seperti yang
ditunjukkan pada Gambar 14.3, kebalikan dari periode jantung adalah interval
waktu antara puncak R-ke-R (dalam milidetik). dikalikan dengan 60 000
memberikan denyun jantung instan. Pola DJJ pada setengah bagian atas Gambar
14.2 adalah plot dari denyut jantung instan yang berturut-turut.

Figure
14.4 Pengukuran fetal electrocardiagram
Data ECG janin yang digunakan dalam studi kasus diambil
dari database penelitian janin. Sinyal ECG diperoleh dengan mengukur secara
diferensial antara elektroda pada kulit kepala janin dan elektroda kulit
standar yang ditempatkan pada paha ibu, dan elektroda ibu kedua digunakan
sebagai tanah (Gambar 14.4).
14.2.1.2 Prekursor sinyal ECG janin
Untuk data kelas 2
dan 3, tingkat kebisingan dan pergeseran baseline membuat deteksi kompleks QRS
dari ECG mentah lebih sulit. Untuk deteksi QRS yang andal, penting untuk
melakukan pra-proses ECG mentah untuk meminimalkan pengaruh sumber-sumber
degradasi sinyal sebelum mencoba mendeteksi kompleks QRS. Diketahui bahwa komponen
frekuensi yang signifikan dari kompleks QRS terletak antara 4 dan 45 Hz.
Pergeseran awal pada ECG biasanya dari frekuensi rendah. biasanya kurang dari
sekitar 3 Hz, meskipun. untuk frekuensi baseline data kelas 3 dapat
diperpanjang hingga 15 Hz lebih.

Figure 14.5 Contoh nilai dari data ECG : (a)
grade 1 (good); (b) grade 2 (average); (c) grade 3 (poor)
RR bandpass digital filter
atau FIR dapat digunakan untuk pm-memproses ECG mentah sebelum deteksi QRS.
Kami lebih memilih penggunaan FIR sebagai filter RR dari order tinggi, misalnya
urutan kedelapan, terkadang berdering ketika terlalu keatas oleh kompleks QRS yang
sempit yang dapat mempersulit penentuan letak tepat dari gelombang R.
Spesifikasi filter yang digunakan dalam penelitian ini adalah sebagai berikut:
• Panjang filter 75
• Frekuensi sampling 500 Hz
• Stopbands 0-1 Hz. 47-250 Hz
• Passband 9-39 Hz
• Riak penumpang 0,5 dB
• Stopband atenuasi 30 dB
Koefisien filter
diperoleh menggunakan metode optimal yang dijelaskan dalam Bab 7. Angka I4.6
(a) hingga 14,6 (c) menunjukkan data ECG yang difilter. Dibandingkan dengan
data mentah tanpa filter, Gambar 14.6 (a) hingga 14.6 (c). pergeseran dasar
serta kebisingan frekuensi tinggi telah berkurang dalam data yang difilter
(mengabaikan transien awal dalam data yang difilter). Dalam data kelas 3,
kesalahan ADC muncul sebagai semburan yang tidak diragukan lagi akan
mengacaukan sebagian besar algoritme deteksi QRS: lihat Gambar 14.6 (c).

Figure 14.6 Filtered ECG data: (a) grade 1
(good); (b) grade 2 (average); (c) grade 3 (poor)
14.2.1.3 QRS template
Kebanyakan metode
pendeteksi QRS bergantung pada ketersediaan templat QRS representatif yang
dibandingkan dengan sinyal ECG yang masuk dibandingkan. Template dapat dihasilkan
dari data ECG mentah dengan mendeteksi dan meratakan beberapa kompleks QRS yang
baik. Ini dapat dilakukan secara otomatis atau semi-tahunan dengan secara
visual memeriksa catatan ECG kelas I dan mengidentifikasi kompleks ECG yang
baik dan tidak ambigu. Gelombang R kemudian disinkronkan dan kompleks QRS
dirata-ratakan. Template QRS tetap dapat digunakan untuk mendeteksi kompleks
QRS atau yang baru dapat dihasilkan pada awal setiap catatan ECG. Contoh dari
template QRS diperoleh dengan rata-rata 69 kompleks QRS dalam data kelas I dan
kemudian mengambil 31 sampel (15 sampel di kedua sisi gelombang R) dari
kompleks QRS rata-rata ditunjukkan pada Gambar 14.7.
14.2.1.4 Metode pendeteksi QRS
Sebuah blok diagnosa
umum dari proses pendeteksian QRS diberikan pada Gambar 14.8. Data ECG mentah
pertama diproses untuk mengurangi efek noise. Sampel data yang diproses
sebelumnya dimasukkan ke buffer satu titik data pada suatu waktu. Untuk setiap
titik data baru yang dimasukkan ke buffer, titik data tertua dihapus dan konten
buffer dibandingkan dengan template QRS di detektor QRS. Output dari detektor
QRS kemudian di-threshold. Banyak metode
pendeteksi QRS lainnya ada.

Figure 14.7 Contoh dari sebuah QRS complex template.
Kurva ini bias didapatkan dari rata-rata 69 QRS complexes in a grade 1 ECG, dengan
gelombang R-waves synchronized.

Figure 14.8 Konsep dari QRS complec detection from raw ECG
Metode-metodenya
1. Rata-rata
magnitude cross-difference (AMCD) (Lindecrantz et al. 1988). saat ini digunakan
dalam monitor janin baru yang dijelaskan dalam Lindecrantz et al. (1988). dan
2. Penyaringan yang
sesuai, yang merupakan metode deteksi QRS umum dan telah diteliti oleh sejumlah
pekerja (Azevedo dan Longini, 1980; Fano. 1968): ini terkait erat dengan metode
korelasi.
Rata-rata perbedaan
magnitudo
Dalam metode ini,
blok data ECG janin pra-pemrosesan dibandingkan dengan kompleks QRS template
seperti yang dijelaskan di atas. Perbedaan antara sampel yang sesuai dalam ECG
dan templat busur dihitung oleh pengurangan bentuk gelombang. Jumlah, y (i),
dari nilai absolut dari perbedaan kemudian dihitung:

di mana x, (k) adalah contoh dari kompleks QRS
template. x (k + i) adalah contoh dari sinyal ECG, N adalah panjang dari
template. dan saya adalah parameter time shift. x, adalah nilai rata-rata dari
template QRS, dan .v, nilai rata-rata dari blok datanya untuk sinyal ECG yang
diberikan oleh

Ketika sinyal ECG dan template QRS sangat mirip, yaitu
di lingkungan kompleks QRS, nilai AMCD. y (i), menjadi minimum (secara teoritis
nol).
Pemfilteran matching digital
Pemfilteran yang cocok umumnya digunakan untuk
mendeteksi sinyal berulang waktu yang terkubur dalam noise. Asumsi utama yang
mendasari dalam metode ini adalah bahwa sinyalnya terbatas waktu dan memiliki
bentuk gelombang yang diketahui. Masalahnya kemudian adalah menentukan waktu
kejadiannya. Respons impuls dari filter yang cocok digital. li (k), adalah
replika waktu-terbalik dari sinyal untuk dia dideteksi. Jadi dalam kasus kami,
jika x, (k) adalah template QRS maka koefisien dari filter yang cocok diberikan
oleh

Filter digital yang
cocok dapat direpresentasikan sebagai
filter FIR dengan struktur melintang biasa, dengan output dan masukan dari
filter yang terkait sebagai

di mana x (i) adalah
sampel dari sinyal input ECG. x, (k) adalah contoh dari template QRS, N adalah
penggarap panjangnya. h (k) dicocokkan dengan koefisien filter, dan saya adalah
indeks time shift. Jelas bahwa ketika template dan kompleks QRS bertepatan,
output dari filter yang sesuai akan menjadi maksimum. Jadi dengan mencari
output dari filter yang sesuai untuk nilai di atas ambang, kemunculan QRS dapat
diuji.
14.2.1.5 Ukuran kinerja untuk deteksi QRS
Untuk mengevaluasi dan membandingkan algoritma membutuhkan ukuran kinerja.
Mengikuti Azevedo dan Longini (1980) kami mendefinisikan ukuran kinerja sebagai
Untuk catatan ECG
yang diberikan, ukuran kinerja mencapai nilai 100% hanya jika semua gelombang R
dalam rekaman dideteksi dengan benar, yaitu tidak ada kesalahan (gelombang R
tidak terdeteksi) dan tidak ada deteksi false (false alarm).
1
4.2.1 .6 Hasil
Gambar 14.9 dan 14.10 menunjukkan kinerja AMCD dan
metode penyaringan yang cocok, masing-masing, diplot terhadap tingkat ambang
batas untuk data kelas 1 dan 2.
Kinerja kedua metode bergantung pada tingkat ambang
batas yang digunakan (masing-masing ambang dinyatakan sebagai bagian dari nilai
sinyal input maksimum) dan panjang dari template QRS. Kinerja terbaik dicapai
dengan tingkat ambang sekitar 50% untuk kedua metode. Template yang lebih luas
cenderung berkinerja lebih baik daripada template yang sempit ketika kualitas
data bagus, tetapi perbedaan utama di antara mereka tampaknya berada dalam
kepekaan mereka terhadap level ambang.
Secara keseluruhan. ada sedikit untuk memilih antara
AMCD dan metode penyaringan yang cocok dalam hal kinerja mereka. Dengan level
ambang yang sesuai, kedua metode mencapai kinerja berikut:
• Deteksi 100% untuk semua tingkat 1
ECG;
•> 90% deteksi untuk data kelas 2;
•> deteksi 60% untuk data kelas 3.

Gambar 14.9 Kinerja metode rata-rata perbedaan luas untuk data dan data kelas 1 dan 2
dari panjang 11 dan 31:

Gambar 14.9 Kinerja metode pemfilteran yang cocok untuk data kelas 1 dan 2 dan untuk
template dengan panjang 11 dan 31:
14.2.2 Pengangkatan adaptif
artefak okular dari EEG manusia
14.2.2.1 Pendahuluan
Metode
yang dijelaskan dalam bagian ini berkaitan dengan penghapusan on-line artefak
okular dari elektroensefalogram manusia (EEG). EEC banyak digunakan dalam
situasi klinis dan psikologis. tetapi sering terkontaminasi secara serius oleh
artefak okular 10As) yang dihasilkan dari pergerakan dalam sistem okular (bola
mata, kelopak mata, dan sebagainya. Sangat rentan terhadap artefak okular. Oleh karena itu
perlu untuk menghapus OA dari EEG sehingga catatan EEG yang benar dapat
dianalisis.
Metode untuk menghilangkan dan mengontrol artefak okular
Masalah mengeluarkan
OA dari EEG dipersulit oleh kesamaan antara mereka dan beberapa gelombang otak
yang menarik, dan oleh spektral yang tumpang tindih di antara keduanya. Istilah
EOG mengacu pada potensi listrik karena gerakan okular diukur antara dua
elektroda kulit yang ditempatkan dekat dengan mata. Semua didasarkan pada
prinsip bahwa OA adalah tambahan pada latar belakang EEG. dalam bentuk diskrit.
Dimana

y (i) dan x (i)
adalah contoh dari EEG dan EOG yang diukur, e (i) adalah EEG 'benar' yang dapat
dianggap sebagai istilah kesalahan, dan saya adalah nomor sampel θ

adalah konstanta
proporsionalitas yang akan disebut parameter artefak okular, dan n itu adalah
jumlah parameter dalam model. Angka 9, juga disebut koefisien transmisi. XO (i)
dan θ adalah vektor EOG dan parameter artefak okular.
masing-masing, dan T menunjukkan transposisi. Jika 9, dapat diperkirakan, maka
perkiraan e (i) dapat diperoleh sebagai
e (i) = y (i) -E0 ix, (i), i = 1, 2, m (14.5)
di mana θ adalah perkiraan θ dan e
(i) adalah perkiraan e (i), dan m adalah jumlah sampel yang digunakan dalam
estimasi. Masalahnya kemudian adalah salah satu perkiraan atau Masalah ini
diilustrasikan pada Gambar 14.11. Untuk jenis gerakan okuler yang diberikan, 8,
cukup konstan tetapi berbeda secara signifikan antara berbagai jenis 0As,
meskipun ada bukti yang menunjukkan bahwa θ bervariasi
perlahan, setidaknya, bahkan untuk tipe OA tertentu.
Kecenderungan dalam
pemrosesan sinyal EEG jelas menuju pemrosesan real-time. dan kemudian perlu
untuk menghapus artefak secara online. Dalam metode offline, perkiraan 0
diperoleh dengan meminimalkan J, jumlah kuadrat dari istilah kesalahan, yaitu J
= ∑_ (i = 1) ^ mi ^ 2. Minimum ini mengarah ke

Figure 14.2 Contoh sebelumnya reported online metode
dari perubahaan artefacts (Girton and Kamiya 1973)

Persamaan ini
memberikan perkiraan kuadrat terkecil-biasa (OLS) dari θ yang dapat diperoleh dengan menggunakan teknik inversi
matriks yang sesuai dan membentuk basis metode penghilangan OA offline. Setelah memperoleh θ, perkiraan OA dan karenanya
latar belakang EEG. e (i), dapat diperoleh dari Persamaan 14.5.
14.2.2.2 Algoritme penghapusan online yang digunakan
dalam sistem OAR
Perhitungan θ, dalam Persamaan 14.6 memerlukan perhitungan waktu dari
matriks inverse. Jelas, pendekatan OLS tidak cocok untuk estimasi real-time
atau online di mana algoritma online melibatkan sejumlah operasi aritmatika
yang tetap dan terbatas dan tidak ada inversi matriks langsung yang lebih
disukai.
Bentuk algoritma LMS
yang umum digunakan adalah

di mana θ(m) dan θ(m + 1) adalah
perkiraan titik sampel θ_ di mth dan θ_n + 1). masing-masing, dan p adalah
konstanta yang mengontrol jalan konvergensi dan stabilitas algoritma. Untuk
konvergensi p tidak boleh diatas batas.
di mana
nilai eigen maksimum matriks (X, X) Persamaan 14.6, Namun, waktu konvergensi
dari algoritma ini berbanding lurus dengan rasio nilai eigen maksimum hingga
minimum (X;X,„), yang dapat sangat besar ketika ada collincarity kuat di antara
variabel input, seperti halnya dengan EOG. Maka

Meminimalkan
J dengan memperhatikan nilai θ mengarah ke algoritma kuadrat terkecil rekursif berikut:


dan argumen
In digunakan untuk menekankan fakta bahwa kuantitas diperoleh pada setiap titik
sampel. y disebut sebagai faktor yang melupakan dan mencegah matriks P (m + 1)
dari cenderung nol (dan θ (m + 1) menjadi konstan) dengan peningkatan sehingga
memungkinkan pelacakan parameter yang bervariasi secara perlahan. Biasanya, y
adalah antara 0,98 dan 1. Nilai yang lebih kecil memberikan terlalu banyak
bobot pada data yang lebih baru yang mengarah ke perkiraan yang berfluktuasi
liar.

Namun,
karena gerakan mata kecil (yang selalu ada), dan kegiatan lain yang biasanya
diambil di saluran EOG, masalah ini tidak begitu serius dalam penghapusan OA.
Masalah ketidakstabilan
numerik dapat diselesaikan dengan faktorisasi yang sesuai dengan matriks P
sehingga perbedaan persyaratan dalam Persamaan 14.9b dihindari. Dua algoritma
tersebut adalah akar kuadrat dan algotithms faktorisasi UD; Namun, dalam hal
penyimpanan dan komputasi, algoritme UD adalah pengaturan bebas akar kuadrat
dari algoritme akar kuadrat konvensional dan dengan demikian memiliki sifat
yang sama dengan yang kedua.
Dalam metode UD, P (m +
1) diperhitungkan sebagai
Dimana U(m+1) adalah matriks segitiga atas unit, U(m+1) adalah transpose dan U(m+1) adalah matriks diagonal. Jadi, alih-alih
memperbarui P, faktor-faktornya, U dan D, diperbarui.
Menggunakan Persamaan 14.11, Persamaan 14.9b dapat ditulis
sebagai

Jika istilah dalam kurung
kotak lebih lanjut diperhitungkan menjadi matriks segitiga dan diagonal atas,
seperti


Membandingkan Persamaan
14.11 dan 14.14 dan tidak ada yang produk dari matriks segitiga atas itu
sendiri segitiga atas dan simetri dalam Persamaan 14.14, maka

Beberapa properti dari algoritma UD
Untuk mendapatkan
beberapa wawasan ke dalam algoritma UD, itu berguna untuk menulis algoritma
secara eksplisit. Jadi, untuk model dua parameter algoritma dari apendiks
menjadi

Hal ini terlihat dari langkah 3 bahwa, asalkan nilai
awal untuk elemen diagonal (yaitu d1(0) dan d2(0)) positif, A2 dan karenanya d1(m+1) akan selalu positif. Hal yang sama berlaku
untuk  (yang merupakan Persamaan 14.9) dan d2(m+1).
(yang merupakan Persamaan 14.9) dan d2(m+1).
Hardware
untuk sistem penghilangan artefak okular online
Pertama, spesifikasi
target untuk sistem ditetapkan. Selanjutnya, sistem yang sesuai dijelaskan pada
sistem dan tingkat diagram blok.
Sistem OAR dirancang
dengan memperhatikan beberapa hal berikut ini:
(1) Kompatibilitas
dengan standar mesin EEG;
(2) Kemampuan
untuk memberikan penghapusan OA secara real-time secara terus-menerus dalam
sinyal EEG multichannel (penghapusan OA sekarang harus didasarkan pada kriteria
subjektif dan harus adaptif);
(3) Kemampuan
untuk menghasilkan EEG yang telah dikoreksi dan / atau EEG dan EOG yang tidak
terkoreksi ke mesin EEG, untuk memungkinkan perbandingan instan EEG yang
dikoreksi dan yang tidak dikoreksi;
(4)
Kemampuan untuk menghindari kejenuhan,
yang akan mengurangi keefektifan korektor, dan sistem harus memiliki fasilitas
auto-range;
(5)
Instrumen harus sesuai untuk digunakan
oleh orang yang dalam kategori pemula.
Penggunaan instrumen
berbasis mikroprosesor juga menawarkan keuntungan sebagai berikut:
(1)
Desain yang
dikendalikan perangkat lunak menghasilkan sistem yang sangat fleksibel.
(2)
Model atau ide
baru dapat diselidiki hanya dengan modifikasi perangkat lunak, tanpa harus
membangun instrumen baru.

(3)
Instrumen yang diprogram
memungkinkan penyediaan rutin untuk memeriksa sendiri, kalibrasi otomatis,
mengurangi masalah kelebihan beban, dan sebagainya.
Perangkat lunak untuk sistem penghilangan artefak
okular on-line
Perangkat lunak
sistem OAR terdiri dari akuisisi data dan rutin distribusi, rutinitas
penghapusan OA on-line, perangkat lunak aritmatika floating point, dan program
utama yang mengawasi. Seluruh perangkat lunak menempati 3 Kbytes memori. Inti
dari perangkat lunak sistem OAR, yang ditulis dalam bahasa rakitan mikroprosesor
68000.
Sistem OAR terganggu karena didorong.
Sinyal interupsi berasal dari modul pengatur waktu yang dapat diprogram (PTM)
di papan pengendali sistem, dan memiliki frekuensi 128 Hz (frekuensi 95 H
kadang-kadang digunakan untuk memungkinkan lebih banyak waktu untuk
perhitungan, dan perubahan frekuensi mudah dibawa dalam perangkat lunak).
Selama fase inisialisasi, pengguna
diundang dengan menggunakan unit tampilan visual (VDU) untuk menentukan
berbagai konstanta sistem, yaitu jumlah saluran EEG yang dikoreksi untuk
artefak, jumlah parameter model dan karenanya model yang seharusnya digunakan
dalam algoritma penghapusan, dan jumlah EEG yang dikoreksi dan / atau awalan
EEG untuk di-output ke mesin EEG.

Gambar Perangkat lunak penghasil artefak okular: (a) program
utama; (b) layanan interupsi rutin
Pengujian sistem dan hasil eksperimen
Tes praklinis pada
sistem OAR dilakukan di Rumah Sakit Freedom Fields. Plymouth. Pada tahap
pertama, tes ekstensif dari keandalan sistem OAR dibuat menggunakan enam subyek
normal. Ini adalah FP2-F4, F4-C4,
C4-P4, FP1-F7, F3-C3, C3-P3, Fz-Cz, Cz mengacu pada cuping telinga kanan atau
AZ dan Cz-Pz. Sinyal EGG berasal dari elektroda yang ditempatkan di dekat mata.

Gambar (a) Koneksi ke mesin EEG; (B) penempatan EOG.
Sinyal EEG dan EOG dimasukkan ke dalam
mesin EEG delapan saluran melalui head box, dan setelah amplifikasi mereka
dimasukkan ke sistem OAR melalui konektor tipe-D 37-arah. Setelah mengeluarkan
OA dari sinyal EEG, baik EEG yang dikoreksi dan mentah (dengan sarana yang
dihapus) dan / atau EOG dimasukkan ke amplifier akhir mesin EEG, dan kemudian
ke bagan kertas untuk pemeriksaan.
Beberapa model digunakan dalam tes,
tetapi hanya tiga yang memberi hasil terbaik akan dijelaskan di sini. Dua di
antaranya memanfaatkan EOG yang berasal dari penempatan elektroda dan juga
ditemukan memberikan penghapusan OA terbaik dalam penelitian sebelumnya. Kedua
model ini adalah sebagai berikut:

Model ketiga, yang
akan disebut model 2H sesuai dengan tatanama sebelumnya, menggunakan EOG yang
berasal dari pasangan penempatan elektroda FP1-F7 dan FP2-F8:

Juga harus
disebutkan bahwa pemilihan saklar pada mesin EEG dapat digunakan untuk
'memaksa' sistem OAR untuk mengimplementasikan berbagai model dengan memilih
pasangan elektroda EOG yang tepat untuk memberi saluran 1 sampai 4.
Hasil yang baik
juga diperoleh dari pasien mental yang tidak kooperatif yang EEG-nya hanya
berisi gelombang rendah amplitudo yang rendah.
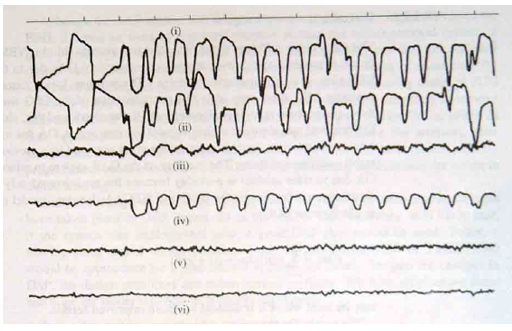
Gambar (I)
dan (ii) mengukur sinyal FOG untuk mata kanan dan kiri: (iii) dan (iv) EEG
diukur pada Cz-A2 dan Fz-Cz elektroda, (v) dan (vi) EEG yang sesuai dengan
artefak yang dihapus.

Gambar (a)
dan (b) mengukur EOG untuk mata kanan dan kiri; (c) mengukur EEG; (d) EEG
dengan artefak dihapus; (e) EEG mentah.
Pembahasan
Pada tes ini,
menggunakan berbagai jenis gerakan okular (berkedip, VEM, HEM), menunjukkan
bahwa adalah mungkin untuk mencapai penghapusan OA yang memuaskan karena
penyebab ini, di semua situs EEG, menggunakan algoritma UD yang stabil secara
numerik. Ditemukan bahwa, di situs EEG yang lebih posterior, sangat sedikit
kontaminasi OA dari EEG diamati dan dalam kasus ini semua model dilakukan
dengan baik. Itu juga menemukan bahwa, meskipun penghapusan OA memuaskan
diperoleh selama gerakan mata vertikal.
Bentuk model
dinamis (untuk satu input atau EOG)

dapat digunakan
jika diinginkan untuk mendapatkan hasil yang lebih baik.
Kesimpulan
Hasil awal
diperoleh dengan subyek normal dan pasien menunjukkan bahwa sistem OAR
memberikan penghapusan OA memuaskan untuk kedipan, gerakan mata vertikal dan
horizontal dan montase elektroda EEG bipolar. Penggunaan algoritme faktorisasi
UD dan sistem yang dikontrol perangkat lunak memungkinkan kami mengatasi
kerugian dari metode penghapusan OA online sebelumnya. Dengan demikian sistem
OAR mampu menangani beberapa artefak, tidak memerlukan kerja sama dari subjek
dalam kalibrasi awal dan mendasarkan kriteria penghapusan pada metode yang
murni obyektif. Sistem ini, yang merupakan yang pertama dari jenisnya,
kompatibel dengan EEG standar yang dapat dibuat dan dijual sebagai aksesori.
Namun, kegunaan instrumen hanya dapat sepenuhnya dinilai setelah uji klinis
yang luas.
Penyetaraan sinyal audio digital
Penyetaraan sinyal
audio merupakan persyaratan fungsional penting dari pencampuran konsol yang
digunakan dalam banyak aplikasi audio profesional dan semi-profesional,
misalnya dalam rekaman studio, penguatan suara dalam sistem alamat publik, dan
penyiaran.
Tiga jenis filter
dasar digunakan :
·
Bell filler Ini
memungkinkan pengguna untuk meningkatkan atau mengurangi frekuensi tertentu
dalam pita audio.

·
Shelf filter
Ini memungkinkan penyesuaian gain dan
frekuensi cutoff dari equalizer pada rentang frekuensi baik pada low atau high
frequency end dari pita audio.
·
Pass filters
Ini adalah filter low-pass dan high-pass
dengan frekuensi cutoff tetap dan digunakan untuk menghilangkan noise frekuensi
rendah dan / atau tinggi dari sinyal audio.
Analisis equalizer
parametrik analog yang khas menunjukkan bahwa setiap jenis filter yang
dijelaskan di atas dapat dilihat sebagai filter Butterworth, dengan fungsi
transfer s-plane dari bentuk-bentuk berikut:

3. Desain dan implementasi filter digital dengan prosesor
matlab dan DSP56002
Tujuan pembelajaran khusus adalah
1. Untuk menggunakan matlab
- Untuk menghitung dan cofficients dan plot frekuensi
filter FIR untuk satu set spesifikasi tertentu
- Untuk menyelidiki efek dari kuantisasi koefisien pada
respon frekuensi.
2. Untuk mengimplementasikan filter FIR menggunakan
prosesor DSP titik tetap
- Untuk mendapatkan keakraban dengan alat pengembangan DSP.
- Untuk mengembangkan program bahasa perakitan sederhana
untuk filter FIR titik tetap.
- Untuk menguji dan mendemonstrasikan pemfilteran waktu
nyata.
Masalah
Persyaratan keluar untuk filter FIR fase linier untuk
menghapus gangguan 1 kHz dari sinyal audio. Filter harus memenuhi spesifikasi
berikut.
Passband Riple 0,5dB
Stopband atenuasi 25dB
Passband 900
- 110 Hz
Frekuensi tepi stopband 990
Hz dan 1010 Hz
Frekuensi sampling 8
kHz
Kita diminta untuk mendesain dan mengimplementasikan filter
menggunakan matlab dan prosesor DSP56002 titik tetap Motorola DSP56002. Tugas
khusus adalah sebagai berikut.
a.
Untuk menerapkan koefisien filter FIR yang
sesuai menggunakan matlab dan metode optimal. Catatan. Anda harus menggunakan
matlab fungsi remezord untuk memperkirakan panjang filter, N. menghitung
koefisien filter menggunakan fungsi remez dan plot respon frekuensi filter
menggunakan fungsi freqz. Berikut persamaan lebah saya berguna untuk menentukan
parameter ripple :


Gambar 14.23 Sebuah filter tiga titik FIR sederhana

Tabel 14.3 Peta memori awal
b.
Untuk menentukan wordlength koefisien yang
sesuai untuk filter dengan melakukan analisis dari kuantisasi koefisien ke
4,8,16, dan bit pada respon frekuensi filter. Catatan. Untuk mengkuantifikasi
koefisien filter ke B-bit, 2 pelengkap, angka titik tetap, kita cukup
mengalikan setiap koefisien dengan 2 ^ (B-1) lalu membulatkan ke bilangan bulat
terdekat. Perbedaan antara koefisien aktual dan representasi titik tetap
memberikan ukuran kesalahan kuantisasi koefisien.
c.
Untuk menerapkan filter pada modul evaluasi
DSP56002 dan verifikasi bahwa filter beroperasi dengan benar. Catatan. Sebagai
pengantar penyaringan digital FIR menggunakan DSP56002, pertimbangkan filter
FIR tiga titik sederhana yang digambarkan pada gambar 14.23. filter FIR
dikarakterisasi oleh persamaan berikut:
Y (n) = h ( 0 ) x (n) + h (1) x ( n-1 ) +h (2) x ( n-2 )
Tabel
14.3 memberikan peta memori awal untuk koefisien dan data untuk filter,
register rO dan r4 digunakan sebagai pointer ke koefisien dan memori data,
masing-masing. Pengalamatan melingkar digunakan. Tabel 14.3 memberikan kode
DSP56002 untuk menerapkan filter sederhana. Kolom komentar menjelaskan
pengoperasian program, program 14.1.
Program 14.1 DSP56002 kode untuk filter 3 titik FIR
sederhana
Move x: (r0) +, y0
;copy
h(2) into register x) and increment pointer r0.
Move y: (r4) +, y0
;copy
x(n-1)into register y0 and increment pointer r4.
Mpy x0,y0, a X: (r0) +, x0 y:(r4) +,y0
:multiply h(2) and x(n-2) and store in
accumulator a.
:copy h(1) into register x0 and
increment r0.
:copy x(n-1) into register y0
and increment r4.
Mac x0, y0, a X; (r0)+, x0 y: (r4)+, y0
:multiply h(1)andx(n – 1) and add to the accumulator a.
:copy a0 into register x0 and
increment r0.
:copy x(n) into register y0 and
increment r4
Mac x0,y0,a y1, y: (r4) +
:multiply h(0) and x(n) and add to
thee accumulator a.
:accumulator a contains the
output sample y(n).
:x(n-2), x(n-1)and x(n) shall
now be referred to as
: x(n-3), x(n-2)and x(n),
overwrite x(n-3) with the
:next input sample stored in
y(1).
Untuk filter FIR dengan banyak koefisien, lebih efisien untuk
menggunakan instruksi pengulangan DSP56002 bersama dengan instruksi mac. Sebuah
fragmen kode DSP56002 diberikan di bawah ini:
Pemfilteran FIR menggunakan instruksi ulangi :
Clr a x(r0)+,x0 y(r4)+,y0
Rep #N-1
Mac x0,y0,a x(r0)+,x0 y(r4)+,y0
Macr x0,y0,a (r0)-
Move a,y:output
d.
Tulis laporan singkat yang memberikan rincian
tentang desain dan penerapan filter Anda, termasuk daftar program matlab dan
DSP56002.
14.4 Pertanyaan DSP berbasis pilihan komputer
Semua pertanyaan adalah pilihan ganda dari beberapa respon dan
skema penandaan saat ini adalah sebagai berikut (meskipun ini dapat dengan
mudah diubah):
Pilihan
ganda correct answer +1
Incorrect
answer -1
No
answer 0
beberapa
tanggapan correct answer +1
incorrect
answer -1
no
answer 0
14.5 Ringkasan
Dalam bab ini, sejumlah desain dan pengembangan papan yang
dapat digunakan untuk mengimplementasikan beberapa algoritma DSP yang
dijelaskan dalam buku telah disajikan. Sejumlah aplikasi dunia nyata DSP
dijelaskan dalam bentuk studi kasus untuk memberikan pembaca beberapa ide
tentang masalah desain praktis. Kami juga telah menyajikan di bagian masalah
sejumlah studi desain yang menantang dan metode, berdasarkan pertanyaan pilihan
ganda, yang kami anggap berguna untuk penilaian cepat dari topik DSP. Keduanya
harus berfungsi sebagai sarana untuk mendapatkan wawasan yang lebih dalam
tentang DSP.
14.1 Tampilkan, nyatakan setiap asumsi yang dibuat, bahwa
fungsi autokorelasi (ACF) dari sinyal yang terkontaminasi oleh suara acak sama
dengan ACF dari sinyal saja, Jelaskan bagaimana hasil ini dapat digunakan untuk
mendeteksi periodikitas tersembunyi.
14.2 Buktikan, nyatakan asumsi apa pun yang masuk akal, bahwa
rasio sinyal terhadap suara maksimum pada keluaran filter pencocokan digital
tidak bergantung pada bentuk gelombang sinyal input.
14.3 Sinyal yang berulang, terkubur di noisem adalah untuk
dideteksi oleh penyaringan digital yang cocok. Diberikan di bawah ini adalah
nilai sampel berturut-turut dari sinyal bebas noise dan sinyal berisik:
Noise bebas signal {-0.51,-0.35,-0.29,-0.25,-0.29,-0.39,-0.47}
Noisy signal {-0.18,-0.06,0.27,0.69,-0.50,-0.44,-0.20,-1.46,-0.93,-1.46,-0.91,-0.39,-1.70}
Menentukan
(a) Koefisien filter yang cocok digital,
(b) Output dari filter yang cocok digital, dan
(c) Peningkatan rasio sinyal terhadap kebisingan, dinyatakan
dalam desibel, dapat dicapai dengan pemfilteran yang sesuai.

Di mana σ2 adalah varians dari noise pada input filter, dan {h
(m)} adalah koefisien filter.
Penyusun


